![]() Micro
Electro Mechanical Systems
Micro
Electro Mechanical Systems
MEMS LABORATORY
![]() Micro
Electro Mechanical Systems
Micro
Electro Mechanical Systems
MEMS LABORATORY
Walking Microrobot
An Omnidirectional Microrobot with Micro Cilia
Team Members
Yu-Ming Chen, Anshuman Shukla, Eric Black, Matt Mohebbi, M. Terry, Joel Reiter, R. Bruce Darling, Karl F. Böhringer
John W. Suh, Greg Kovacs (Stanford)Summary
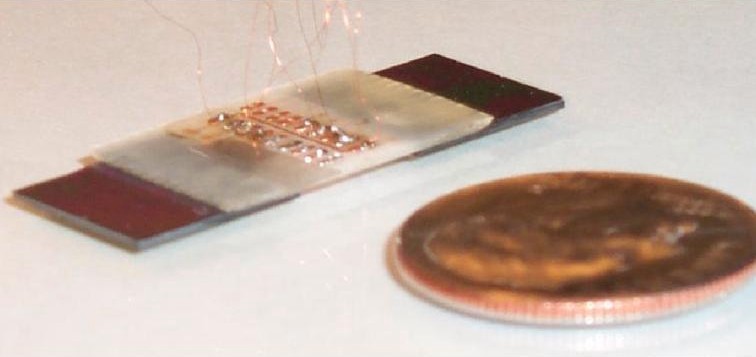
An omnidirectional mobile microrobot realized by microelectromechanical system (MEMS) actuator arrays is presented. The microrobot consists of two rigidly connected microcilia array chips, each having an 8x8 array of "motion pixels," which are composed of four orthogonally oriented thermal bimorph actuators. This allows for reliable, accurate motion in three degrees of freedom (x;y;theta) in the plane, a first for a microrobot of this kind. The microrobot is approximately 3cm in length, 1cm in width, 1mm in height, and has a mass of less than half a gram. By varying the input power, actuation frequency and motion gait strategy the velocity of the chip can be precisely controlled. Motion in three degrees of freedom has been demonstrated and a maximum velocity of 635 µm/s and carrying capacity greater than 1.448 g (two 8-pin ICs) has been observed. The microrobot has been characterized extensively and a model for its performance is described.
Figure 1: Microrobot in relation to a US Dime. Note the two (dark) cilia chips bonded to the PCB board. Wire bonds on the bottom side connect the 5 channels of each chip to pads on the PCB board. Nine wires (two sets of four directions plus a common ground) soldered to the top side pads connect the robot to the controller. Figure 2: Northwest motion translational displacements. Plots represent, from bottom up, 30, 60, 120 and 90Hz control frequencies. The highest velocity for these frequencies is achieved at 90Hz. Videos
Selected Publications
- Yu-Ming Chen, John W. Suh, Gregory T. A. Kovacs, R. Bruce Darling, Karl F. Böhringer, "Modeling and Control of a 3-Degree-of-Freedom Walking Microrobot," Hilton Head 2006: A Solid State Sensor, Actuator, and Microsystems Workshop, Hilton Head Island, NC, June 4-6, 2006. Paper. Talk.
- Yu-Ming Chen, "Thermal Model of a Microrobot", M.S. thesis, University of Washington, Seattle, WA, December 2005.
- Matthew H. Mohebbi, M. L. Terry, Karl F. Böhringer, John W. Suh, Gregory T. A. Kovacs, "Omnidirectional Walking Microrobot Using MEMS Thermal Cilia Arrays." ASME International Mechanical Engineering Congress and Exposition (IMECE'01), no. 23824, New York, NY, November 11-16, 2001. Paper.
A complete list of our publications (many of them available online) can be found here.
Acknowledgements
- NSF CAREER award ECS- 9875367 (REU supplement)
- AFRL prime contract F29601-98-D-0210, USRA subcontract 9500-20
- DARPA contract N001-92-J-1940-P00001, a General Motors Key grant and NSF NYI award ECS-9358289-006 to G. Kovacs (chip fabrication)
© Karl F. Böhringer, Department of Electrical Engineering, Box 352500, Seattle, WA 98195-2500, USA